
Suunnittelu ja innovaatiot | NRO 1/2026
Lakan vähähiilisiä betonituotteita valmistukseen Carbonaide-menetelmällä
Lakka Rakennustuotteet ottaa betonituotteidensa teolliseen valmistukseen käyttöön Carbonaiden kehittämän,…
Suunnittelu ja innovaatiot | NRO 3/2024

Tämä artikkeli perustuu AI in AEC 2024 -konferenssissa pidettyyn esitykseen tekoälyn käyttöönotosta ja erityisesti ensimmäisten askeleiden ottamisesta aloittelijan näkökulmasta. Tarkoituksena on kannustaa kaikkia asiasta kiinnostuneita kokeilemaan tekoälyä tekniikkana, joka tulee muokkaamaan paitsi elämäämme ylipäätään, myös rakennettua ympäristöä kokonaisuutena.
Tekoäly on kuuma aihe, jolta odotetaan turhan usein taianomaisia nopeita hyötyjä, ja nykyisten työtehtävien tekijävaihdosta ihmisestä koneeseen yhdessä yössä. Joskus tekoäly niputetaan kaikenkattavaksi kattotermiksi, jolla voidaan tuomita kaikki sen alla olevat palvelut ja tekniikat yhdellä hutaistulla testillä umpisurkeiksi. Esimerkkinä tästä lehtiartikkelit, joissa ”toimittaja X kokeilee nyt sitä tekoälyä, käyttää sitä huonosti tai väärin tai tehtäviin mihin sitä ei ole tarkoitettukaan, toteaa että tulos ei ole hyvä, ja tekee johtopäätöksen tekoälyn huonoudesta.” Tästä saattaa harjaantumattomalle lukijalle syntyä kuva, että tekoäly on pelkkää pöhinää ja mitään oikeaa hyötyä siitä ei ole.
Tämä teksti perustuu kirjoittajan omiin kokemuksiin tekoälyn käyttöönotossa. Seuraavassa esitellään kolme käytännön esimerkkiä, jotka liittyivät rakenteiden mekaniikkaan, suunnittelunormeihin ja rakennusten hiilijalanjäljen ennustamiseen. Yksinkertaisemmista esimerkeistä siirrytään monimutkaisempiin, käyttäen koneoppimista (ML, machine learning), erityisesti regressiota. Tämä tarkoittaa sitä, että koneoppimismalli opetettiin ennustamaan uusia arvoja aiemmin annetun datan perusteella.
Esimerkkitapauksissa, näissä kirjoittajan oman tekoälypolun ensimmäisissä askeleissa, käytettiin Microsoftin ML.NET-koneoppimiskirjastoa, mutta Grasshopperin kautta eli visuaalisen ohjelmoinnin keinoin. Grasshopper on natiivi lisäosa Rhinoon, ja siitä löytyy kolmannen osapuolen kehittämä Lunchbox-lisäosa, mikä käytännössä sisältää tärkeimmät toiminnallisuudet aiemmin mainitusta Microsoftin ML.NETistä.
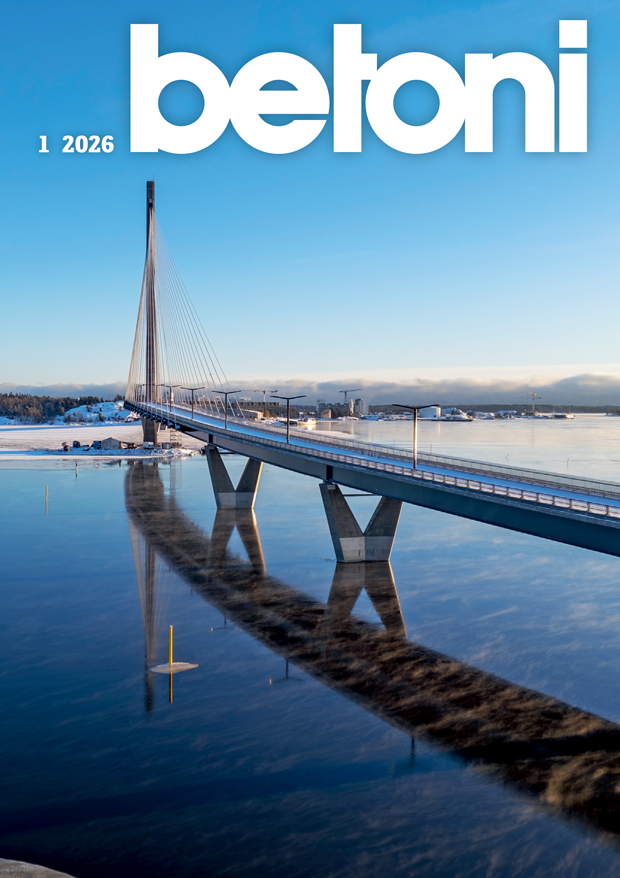
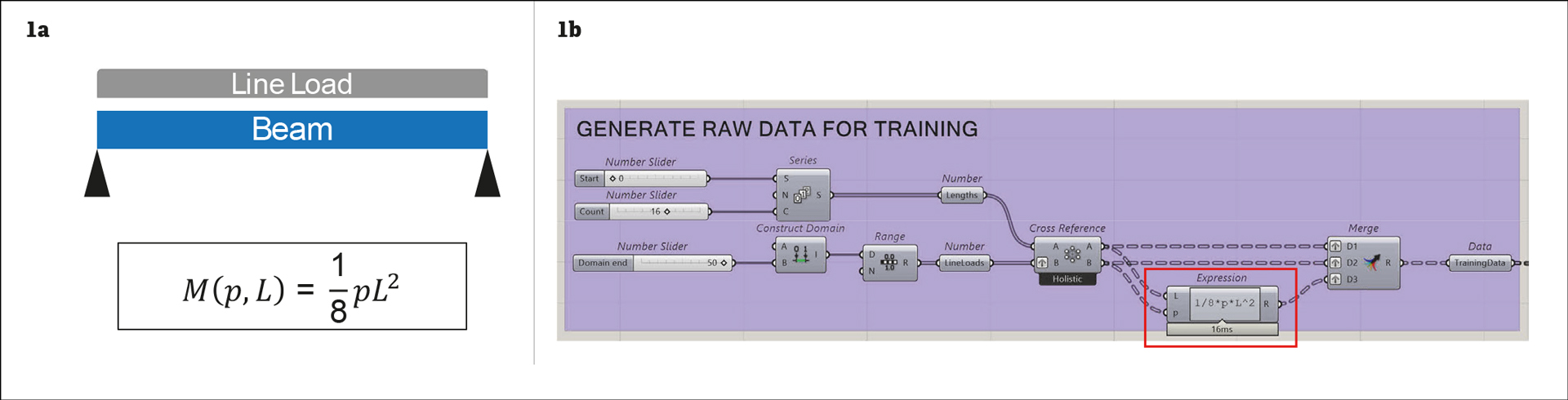
Ensimmäinen esimerkki oli yksiaukkoisen palkin maksimitaivutusmomentin arvon ennustaminen, kun tiedetään palkin jänneväli sekä palkkia rasittava viivakuorma. Ajatuksena oli, että jos malli koulutetaan riittävällä määrällä ”mallisuorituksia” kaavan soveltamisesta, niin se kykenisi ennustamaan oikean arvon myös sille aiemmin tuntemattomilla lähtötiedoilla. Kävi ilmi, että malli toimii hienosti, kunhan pyydetty viivakuorma ja jänneväli ovat koulutusdatan ”sisäpuolella”.
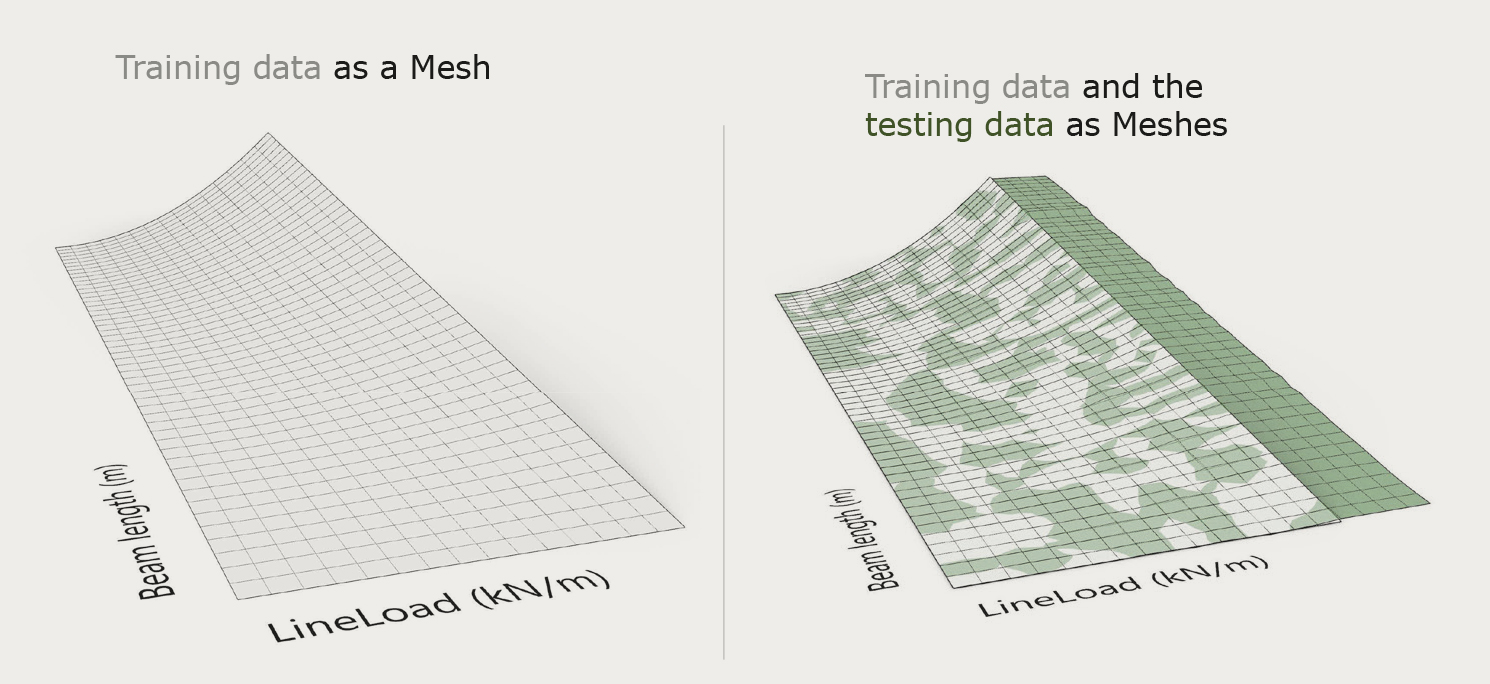
Toinen esimerkki koski teräspalkin painon ennustamista, kun tiedetään palkin jänneväli, sillä vaikuttava viivakuorma sekä kolmantena lähtötietona myös pistekuorma keskellä jännettä. ”Oikeana” vastauksena pidettiin kevyintä tietyn poikkileikkaustyypin profiilia, joka täyttää Eurokoodin asettamat vaatimukset palkille niin murto- kuin käyttörajatilassa. Tehtävää voisi ajatella teräspalkin mitoitustyökaluna, joka kertoo kevyimmän tapaukseen soveltuvan profiilin. Optimisauvan mitoittamisessa koulutusdataa laadittaessa käytettiin Karamba3D-lisäosaa, joka sisältää valmiit komponentit teräsrakenteiden Eurokoodi-pohjaiseen mitoitukseen ja optimointitehtäviin. Lopputuloksena oli toimiva malli, joka antoi arvion optimaalisen teräspalkin painosta millisekunneissa.
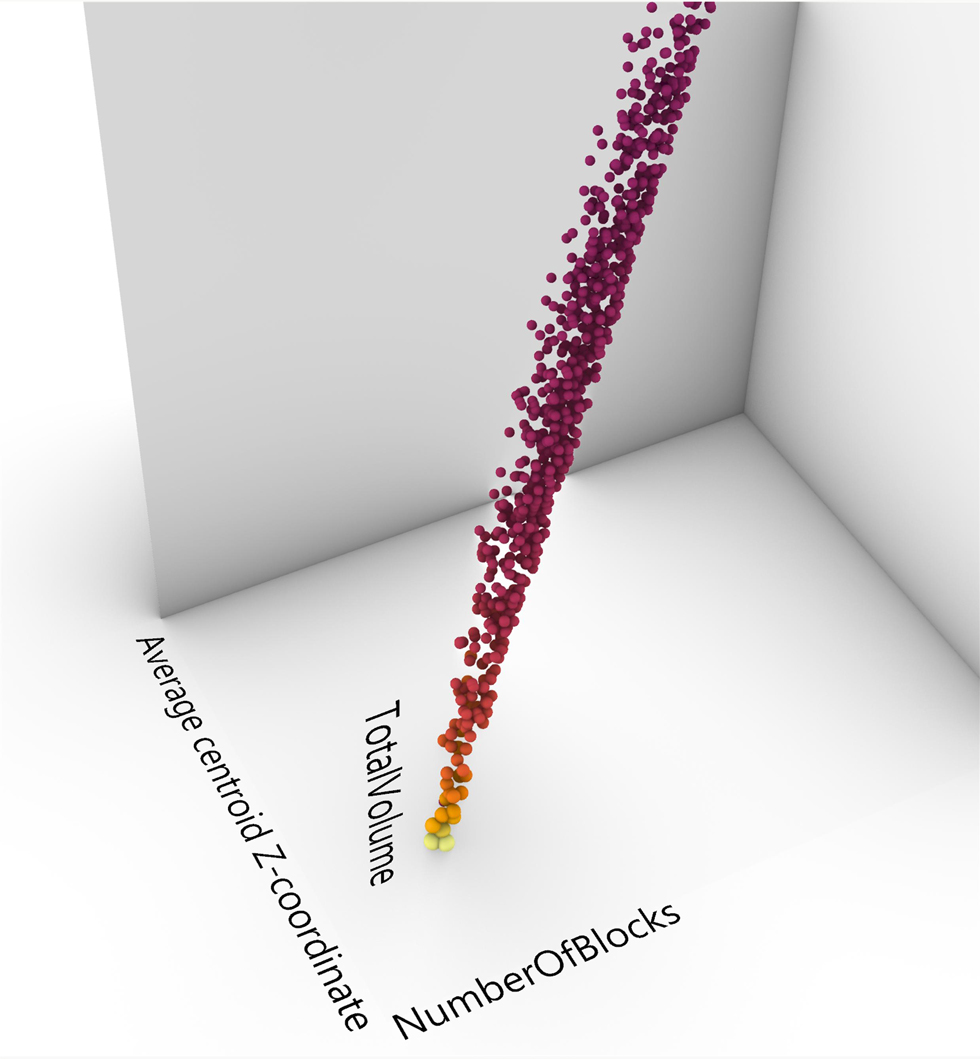
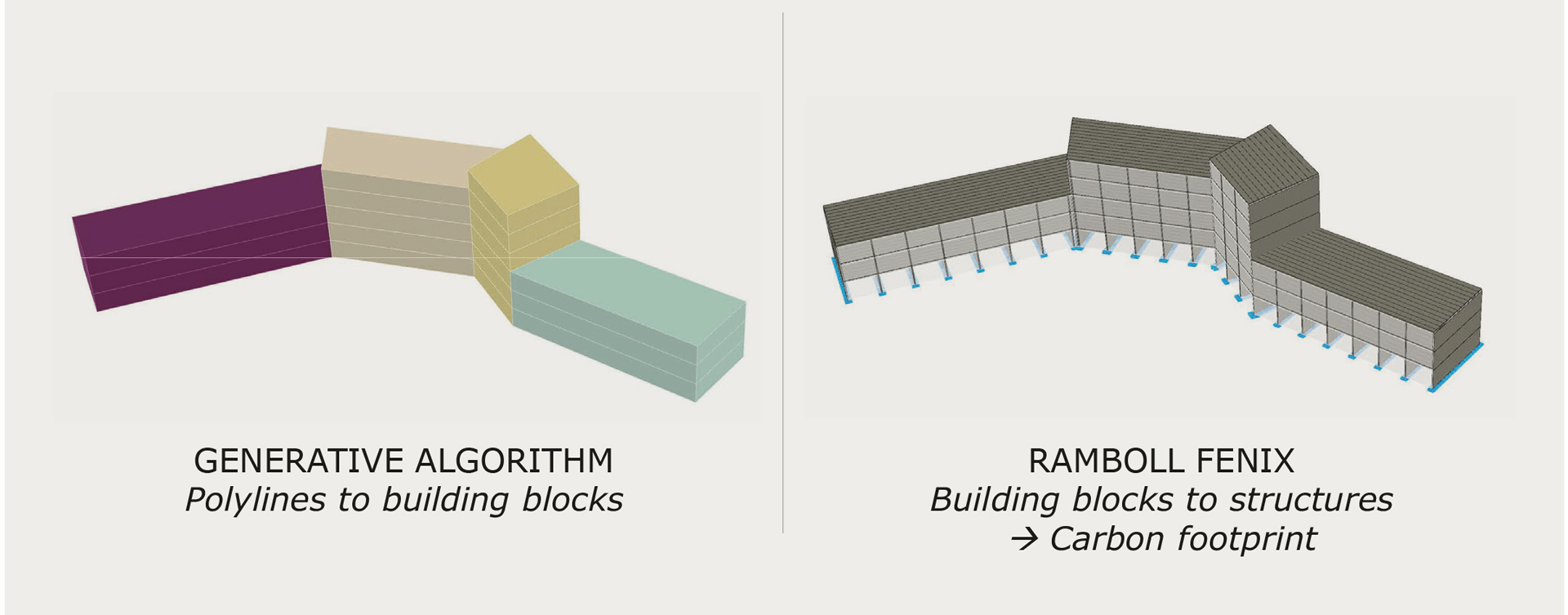
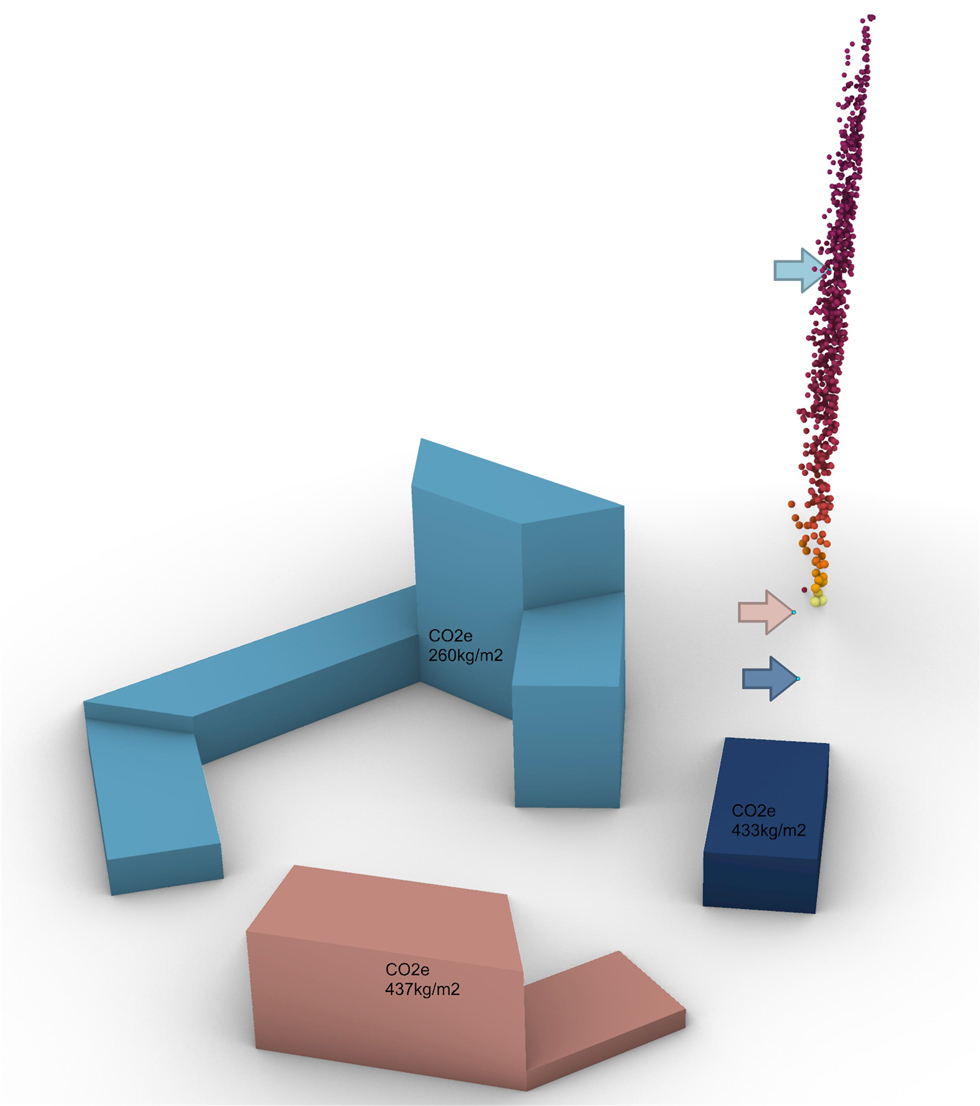
Kolmas ja viimeinen esimerkki puolestaan oli taas asteen verran monimutkaisempi taustayhtälöiltään ja logiikaltaan. Tehtävänä oli ennustaa betonirunkoisen kerrostalon hiilijalanjälki, kun tiedetään rakennuksen massoittelu arkkitehdin näkökulmasta. Eli toisiinsa kytkeytyvät tilaobjektit lähtötietona, ja tuloksena on hiilijalanjälki muodossa CO2e-kg/m2, eli pinta-alapohjainen hiilijalanjälki. Tarkoituksena oli vertailla vapaavalintaisia massoitteluvaihtoehtoja toisiinsa. Lopputulos oli kannustava, vaikkakin huomattavasti laajempi määrä esilaskettuja rakennuksia koulutusdatassa on tarpeen, jotta mallin kattavuutta saadaan parannettua.
Yhteenvetona tutkituista esimerkeistä voidaan nostaa seuraavat asiat:
On syytä huomata, että esitetyt esimerkkikäyttökohteet ovat materiaaliriippumattomia. Aivan samalla tavalla voidaan mitoittaa betonirakenteita, ennustaa puurakenteiden kokonaishiilijalanjälkeä tai optimoida teräsliitoksia. Esimerkkitapauksia voi ajatella laajemmin täsmällisen asiantuntijatiedon ja -osaamisen tiivistämisenä ennustavaksi malliksi. Mitä monimutkaisempi kokonaisuus on kyseessä, sitä merkityksellisemmäksi tulee tekoälymallin kouluttaminen kyseisen ilmiön ennustamiseen. Vastaavasti, yksiaukkoisen palkin maksimitaivutusmomentin voi laskea aina tarkasti yhdellä ainoalla yhtälöllä, joten tekoälymallia suoraan tähän käyttötapaukseen ei varmaankaan kannata toteuttaa muuten kuin oppimistarkoituksissa. Koulutettuja malleja voidaan myös liittää osaksi laajempaa kokonaisuutta tai vaikkapa suunnitteluprosessia, jossa jokainen malli ratkaisee oman rajatun tehtävänsä.
Tekoäly on muutakin kuin koneoppimisen regressiomalleja. Esimerkiksi syväoppiminen (DL, deep learning) mahdollistaa huomattavasti monimutkaisempien epälineaaristen suhteiden mallintamisen ja oppimisen. Yhtenä näkyvimmistä esimerkeistä syväoppimisen soveltamisesta ja mahdollisuuksista toimivat nykyisin yleiset laajat kielimallit (LLM, large language model) kuten ChatGPT, Claude ja Gemini. Tekoälykehitys laukkaa vauhdilla eteenpäin ja mallien kouluttamiseen sekä käyttöön pumpataan valtavia summia rahaa. Odotuksena on, että laskentatehon kasvattaminen, algoritmien kehittäminen ja koulutusdatan laadun parantaminen ja määrän lisääminen tuottaa yhä ”älykkäämpiä” malleja. Kehitys on ollut huimaa ja oletettavasti seuraavan puolen vuoden aikana näemme seuraavan sukupolven kielimallien suorituskyvyn.
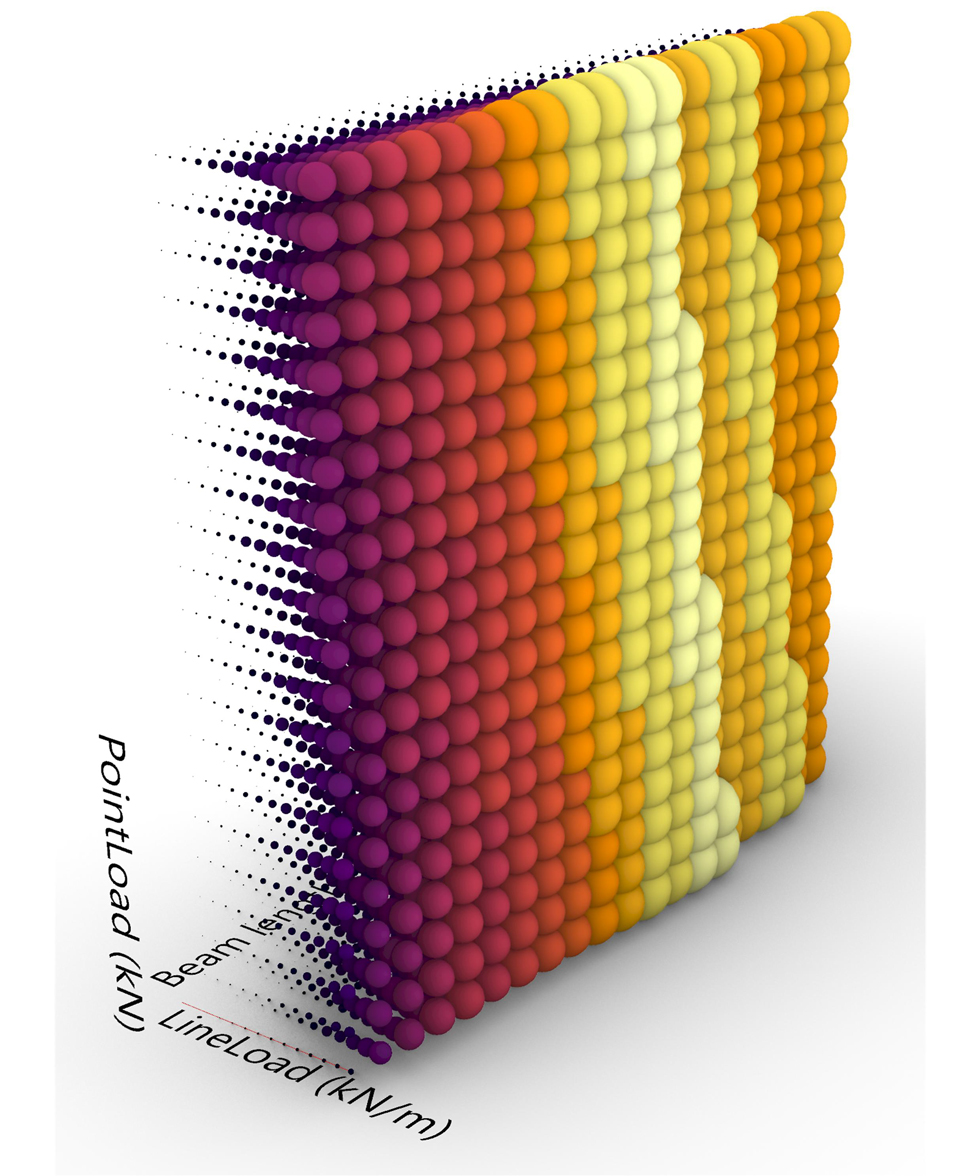
Kuva 2: Teräspalkin optimimassan (Eurokoodi 3) ennustaminen. Mitä suurempi ja kirkkaampi pallero kyseessä, sitä suurempi vaadittu massa.
Kuva 3: Betonirakennusten (1000 datapistettä) hiilijalanjälki kolmen muuttujan funktiona. Mitä kirkkaampi ja suurempi pallo, sitä suurempi kyseisen rakennuksen pinta-alakohtainen hiilijalanjälki.
Keskusteluissa kielimalleja ja esimerkiksi kuva- ja videogeneraattoreja käyttävien/kokeilleiden kanssa on noussut esiin useammanlaista suhtautumista tämänkaltaiseen generatiiviseen tekoälyyn. Osa näkee jo nykyisen selvän hyödyn näissä palveluissa ja käyttää niitä aktiivisesti eri käyttötarkoituksiin. Osa vielä odottaa seuraavaa mallisukupolvea, ja ehkä sitten vasta hyppää kyytiin. Osalle taas uhkakuvat tai mallien huono suorituskyky tietyntyyppisissä käyttöskenaarioissa on se päällimmäinen ajatus. Varmastikin uusi tekniikka aina paljastaa syvempiä psykologisia eroavaisuuksia ihmisistä ja siitä, miten kukakin uuden tekniikan ottaa vastaan – uhkana vai mahdollisuutena.
On ilmiselvää, että jo pitkään on esimerkiksi kielimalleja pystytty hyödyntämään väsymättöminä kotiopettajina, ohjelmointiapureina, ideoiden pallottelukavereina, laajemman tekstimassan tiivistämisenä oleelliseen sekä käännöstarkoituksessa niin puhutuista kielistä kuin ohjelmointikielistä toiseen. Oleellinen muutos on jo tapahtunut, eikä enää tarvitse odottaa mitään erityistä hetkeä tulevaisuudesta, jolloin nämä järjestelmät muuttuvat hyödyllisiksi. Ne ovat sitä jo. Kaikkien pitäisi kokeilla ennakkoluulottomasti kaikenlaisia tekoälyyn nojaavia palveluita, ovat ne kielimalleja, kuvageneraattoreita, musiikin luontiin tarkoitettuja palveluita tai Microsoftin Copilot-järjestelmiä. Samalla oppii tärkeitä taitoja, jotka ovat kuukausi kuukaudelta välttämättömämpiä vuorovaikutustekniikoita tietokoneiden kanssa. Sosiaalisessa mediassa kiersi äskettäin video, jossa kahdeksanvuotias lapsi sujuvasti koodaa Harry Potter -aiheista nettisivuaan tekoälyyn nojaavalla koodieditorilla. Jälleen kannattaa katsoa vähän laajemmalla perspektiivillä ja miettiä, mitä tämä muutos merkitsee. Lapsillemme nämä systeemit ovat ja tulevat olemaan arkipäivää, sellaista mitä on aina ollut olemassa. Kun kyseinen sukupolvi varttuu työelämään, ja siihen yhdistetään aiemmin mainittu valtava rahallinen panostus tekoälytutkimukseen ja -kehitykseen halki niiden vuosien, niin maailma näyttää varmasti erilaiselta kuin nyt.
Kannattaa hypätä tekoälyjunaan jo nyt. Koskaan ei ole ollut yhtä helppoa oppia uutta kuin tänään.

Artikkeliin liittyviä aiheita